
| en | es |
Check this page regularly to ensure you have the most up to date information.
Floor
The floor will be a white felt fabric:
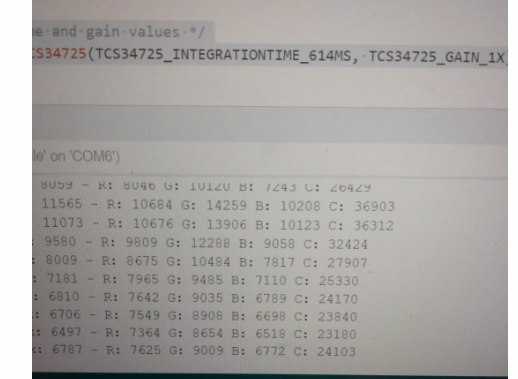
This is a TCS34725 sensor reading from the white floor that will be used in the competition:
Hazardous Material Detection - Color Sensing:
Your team’s task is to deploy robots to detect hazardous materials on the patrol route. The hazardous materials can be identified according to the colour of the ground and so your robot should be equipped with color detection sensors and a line following capability as this will guide you along the route.
Teams must program their robots to follow a designated line on the track. As the robot progresses, it must use sensors to detect different colors on the track surface. Upon detecting a color, the robot must stop and activate the corresponding LED lights.

Teams must notify the referee whether control will be by RC (Remote Control) or using Auto (Automation) using the flip card at the starting point.
RC
If your team chooses RC, your robot may be controlled remotely. Once the robot reaches a colour, it must stop momentarily and display the corresponding LED lights on the robot. this may be done manually by pressing a button or automatically by detecting the colour.
Auto
If your team chooses Auto, your robot must complete the task autonomously. The team may start the task by pressing a 'start' button on the robot or on a remote control. No other interaction will be allowed.
Task specific details:
- The dimensions of the track are approximately 2m wide by 4m long
- The track will have a light brown mdf perimeter 10cm tall.
- The black line will be marked with 5cm black Duct Tape.
- Colours (yellow, red, blue, green) will be in the shape of a square (5cm x 5cm) and made of card. Colours will be placed on a straight part of the track. There will be 10cm of straight black line on both sides of the coloured section.
- The line will begin at the opening of the start position marked with 5cm black duct tape (See image above).
- The exact position of the coloured regions and the black line will not be shared in advance and may change during the competition.
- See general rules for more information.
Scoring:
Scoring will be the same for both 'RC' and 'Auto'. There will be 2 separate categories for this task.
- 10 points for keeping your robot on the black line.
- 10 points for stopping on each detected colour for a moment.
- 10 points: For led corresponding to each detected colour.
- Time points (120 – running time) will be awarded if maximum points have been scored and the robot returns to the starting position.
E.g. If the robot stays on the line (10), stops for a moment on each colour (40), detects and displays the correct coloured LED (40), and returns to the start in 97 seconds, the team will be awarded an additional 23 points, total: 113 points.
Operation Safe Passage - Obstacle Avoidance:
In this task, you must deploy a robotic unit with an obstacle detection capability to guide a humanitarian convoy through a complex terrain filled with obstructions in a conflict zone.
The track will have a line to accommodate a line following capability in automatically controlled robots. The line will have obstacles on it so robots will have to navigate these to progress.
Teams must notify the referee whether control will be by RC (Remote Control) or using Auto (Automation) using the flip card at the starting point.
RC
If your team chooses RC, your robot may be controlled remotely. Once the robot reaches an obstacle, it must sound an alarm. This may be done manually by pressing a button or automatically by detecting the obstacle.
Auto
If your team chooses Auto, your robot must complete the task autonomously. The team may start the task by pressing a 'start' button on the robot or on a remote control. No other interaction will be allowed.
Task specific details:
- The dimensions of the track are approximately 2m wide by 4m long
- The track will have a light brown mdf perimeter 10cm tall.
- The black line will be marked with 5cm black Duct Tape.
- Six obstacles (stones) will have various shapes and sizes. They will be placed on a straight part of the black line.
- The line will begin at the opening of the start position marked with 5cm black duct tape.
- The exact position of the obstacles and the black line will not be shared in advance and may change during the competition.
- See general rules for more information.
Scoring:
- 10 points for keeping your robot on the black line except for when avoiding an obstacle.
- 10 points: For alarm sounding when detecting each obstacle.
- 10 points for each obstacle avoided successfully.
- Time points (120 – running time) will be awarded if maximum points have been scored and the robot returns to the starting position.
E.g. If the robot stays on the line (10), avoids each obstacle (60), sounds an alarm when detecting each obstacle (60), and returns to the start in 97 seconds, the team will be awarded an additional 23 points, total: 153 points.
Organizing Medical Supplies - Sorting:
As we prepare for a humanitarian mission, our logistics team is counting on your expertise to categorize and streamline supplies for swift distribution. Your task is to group these essential items according to their color, ensuring a seamless deployment strategy for prompt assistance to impacted regions.
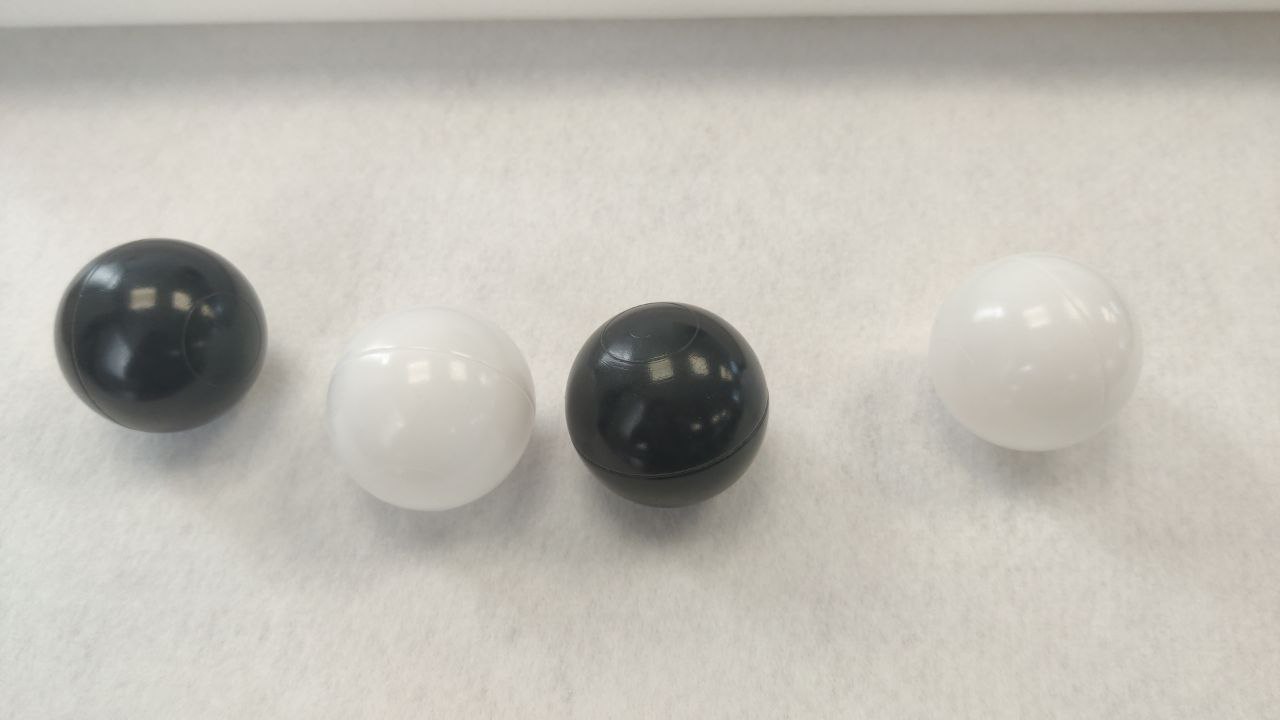
Competitors must program their robots to sort white and black balls into designated areas on the track. White balls should be placed in a white area, while black balls should be placed in a black area.

Teams must notify the referee whether control will be by RC (Remote Control) or using Auto (Automation) using the flip card at the starting point.
RC
If your team chooses RC, your robot may be controlled remotely. The operator may move the robot around the area collecting balls and depositing them in the correct area.
Auto
If your team chooses Auto, your robot must complete the task autonomously. The team may start the task by pressing a 'start' button on the robot or on a remote control. No other interaction will be allowed.
Task specific details:
- The dimensions of the track are approximately 2m wide by 2m long
- The track will have a light brown mdf perimeter 10cm tall.
- A white area measuring 50cm x 50cm will be located in the far left corner, marked by two 1cm tall white wooden pieces. A black area of the same size will be positioned in the far right corner, marked by two 1cm tall black wooden pieces.
- Five white 5.5cm diameter balls and five 5.5cm diameter black balls will be placed randomly in the square.
- The exact position of the balls will not be shared in advance and may change during the competition.
- See general rules for more information.
Scoring:
- 10 points for each ball placed in the correct coloured region
- Time points (120 – running time) will be awarded if maximum points have been scored and the robot returns to the starting position.
E.g. If the robot places 7 balls in the corresponding box (70), and returns to the start in 97 seconds, the team will be awarded an additional 23 points, total: 93 points.
Landmine Locator - Magnetic field Detector:
In a conflict-ridden region, the UN Counter-Terrorism Task Force deploys robots with magnetic field detection sensors to locate hidden improvised explosive devices (IEDs) on a route. Upon detection, the robot sounds an alarm, aiding in threat neutralization and ensuring the safety of personnel.
In this task, the route will be marked with a black line and filled with various flat magnetic objects. Competitors must equip their robots with magnetic field detection sensors to identify and locate these objects. Once detected, the robot should sound an alarm.
Teams must notify the referee whether control will be by RC (Remote Control) or using Auto (Automation) using the flip card at the starting point.
RC
If your team chooses RC, your robot may be controlled remotely. Once the robot detects a magnetic field, it must stop momentarily and sound a buzzer on the robot.
Auto
If your team chooses Auto, your robot must complete the task autonomously. The team may start the task by pressing a 'start' button on the robot or on a remote control. No other interaction will be allowed.
Task specific details:
- The dimensions of the track are approximately 2m wide by 4m long
- The black line will be marked with 5cm black Duct Tape.
- The line will begin at the opening of the start position marked with 5cm black duct tape.
- The exact position of the landmines (fridge magnets) and the black line will not be shared in advance and may change during the competition.
- See general rules for more information.
Scoring:
- 10 points for keeping your robot on the black line.
- 10 points for stopping on the landmine momentarily.
- 10 points: For sounding a buzzer to indicate detection of a landmine.
- Time points (120 – running time) will be awarded if maximum points have been scored and the robot returns to the starting position.
E.g. If the robot detects 3 landmines bu sounding a buzzer (30), stops for a moment on each landmine (30) and returns to the start in 97 seconds, the team will be awarded an additional 23 points, total: 83 points.
Supply Chain - Water Bottles:
Competitors program their robots to scan, locate, collect, and precisely deposit a standard 330ml water bottle, containing 25ml of water, on the track marked with a line, simulating a crucial supply retrieval task in a disaster relief scenario. The robot must follow a line to the water bottle zone, locate the bottle, deliver it to the designated area and return home.
Teams must notify the referee whether control will be by RC (Remote Control) or using Auto (Automation) using the flip card at the starting point.
RC
If your team chooses RC, your robot may be controlled remotely.
Auto
If your team chooses Auto, your robot must complete the task autonomously. The team may start the task by pressing a 'start' button on the robot or on a remote control. No other interaction will be allowed.
Task specific details:
- The dimensions of the track are approximately 2m wide by 4m long
- The black line will be marked with 5cm black Duct Tape.
- The line will begin at the opening of the start position marked with 5cm black duct tape.
- The bottle will be a standard 33cl water bottle containing 25ml of water and will be positioned on the black line.
- The position of the water bottle, the black line and the refilling area will not be shared in advance and may change during the competition.
- See general rules for more information.
Scoring:
- 10 points for keeping your robot on the black line.
- 10 points: For any movement of the bottle.
- 10 points: If the bottle is touching the ground in the refilling area.
- Time points (120 – running time) will be awarded if maximum points have been scored and the robot returns to the starting position.
E.g. If the robot stays on the line (10), moves the bottle (10), places it in the circle (10) and returns to the start in 97 seconds, the team will be awarded an additional 23 points, total: 53 points
*Please note that rules of the robotics competition are subject to change. The organisers reserve the right to modify, add, or remove rules as necessary for the fair and safe conduct of the competition. Any updates will be posted on this website, the Robotics Competition official channel, and participants are expected to stay informed and adhere to the latest rules.
Thank you for your understanding and cooperation.

| en | es |
Consulta esta página regularmente para asegurarte de tener la información más actualizada.
Suelo
El suelo será de tela de fieltro blanco.
Este es un valor de lectura del sensor TCS34725 del suelo blanco que se utilizará en la competencia.
Detección de Materiales Peligrosos - Sensor de Color:
La tarea de tu equipo es desplegar robots para detectar materiales peligrosos en la ruta de patrulla. Los materiales peligrosos pueden ser identificados según el color del suelo, por lo que tu robot debe estar equipado con sensores de detección de color y capacidad para seguir una línea, ya que esto te guiará a lo largo de la ruta.
Los equipos deben programar sus robots para seguir una línea designada en la pista. A medida que el robot avanza, debe usar sensores para detectar diferentes colores en la superficie de la pista. Al detectar un color, el robot debe detenerse momentáneamente, activar luces LED correspondientes en el cuerpo del robot e indicar el color en una pantalla.
Los equipos deben notificar al árbitro si el control será mediante RC (Control Remoto) o Auto (Automatización) utilizando la tarjeta de selección en el punto de inicio.
RC
Si su equipo elige RC, su robot puede ser controlado de forma remota. Una vez que el robot llegue a un color, debe detenerse momentáneamente y mostrar las luces LED correspondientes en el robot. Esto se puede hacer manualmente presionando un botón o automáticamente mediante la detección del color.
Auto
Si su equipo elige Auto, el robot debe completar la tarea de forma autónoma. El equipo puede iniciar la tarea presionando un botón de "inicio" en el robot o en un control remoto. No se permitirá ninguna otra interacción.
Detalles específicos de la tarea:
- Las dimensiones de la pista son aproximadamente 2m de ancho por 4m de largo.
- La línea negra estará marcada con cinta adhesiva negra de 5 cm de ancho.
- Los colores (amarillo, rojo, azul, verde) tendrán forma de cuadrado (5 cm x 5 cm) y estarán hechos de cartulina y se colocará en una parte recta de la pista. Habrá 10 cm de línea negra recta en ambos lados de la sección coloreada.
- La línea comenzará en la apertura de la posición de inicio, marcada con cinta adhesiva negra de 5 cm de ancho.
- La posición exacta de las regiones coloreadas y de la línea negra no se compartirá con antelación y puede cambiar durante la competencia.
- Consulta las reglas generales para más información.
Puntuación:
- 10 puntos por mantener tu robot en la línea negra. Al menos una rueda debe estar tocando la línea negra; de lo contrario, no recibirás estos puntos.
- 10 puntos por detenerse en el color detectado momentáneamente.
- 10 puntos por encender el LED correspondiente al color detectado.
- Se otorgarán puntos por tiempo (120 - tiempo de ejecución) si se han obtenido los puntos máximos y el robot regresa a la posición de inicio.
Por ejemplo, si el robot permanece en la línea (10 puntos), se detiene momentáneamente en cada color (40 puntos), detecta y muestra el LED correspondiente al color (40 puntos) y regresa al inicio en 97 segundos, el equipo recibirá 23 puntos adicionales, sumando un total de 113 puntos.
Operación Paso Seguro - Evitación de Obstáculos:
En esta tarea, debes desplegar una unidad robótica con capacidad de detección de obstáculos para guiar un convoy humanitario a través de un terreno complejo lleno de obstrucciones en una zona de conflicto.
Las dimensiones de la pista y el tamaño, forma y disposición de los diferentes obstáculos se compartirán aquí. La pista tendrá una línea para acomodar una capacidad de seguimiento de línea en robots controlados automáticamente. La línea tendrá obstáculos, por lo que los robots tendrán que navegar estos para avanzar.
Los equipos deben notificar al árbitro si el control será por RC (Control Remoto) o mediante Auto (Automatización) usando la tarjeta de cambio en el punto de inicio.
RC
Si su equipo elige RC, su robot puede ser controlado de forma remota. Una vez que el robot llegue a un obstáculo, debe sonar una alarma. Esto puede hacerse manualmente pulsando un botón o automáticamente al detectar el obstáculo.
Auto
Si su equipo elige Auto, su robot debe completar la tarea de manera autónoma. El equipo puede iniciar la tarea presionando un botón de "inicio" en el robot o en un control remoto. No se permitirá ninguna otra interacción.
Detalles específicos de la tarea:
- Las dimensiones de la pista son aproximadamente 2m de ancho por 4m de largo.
- La línea negra estará marcada con cinta adhesiva negra de 5 cm de ancho.
- Seis obstáculos (piedras) tendrán varias formas y tamaños. Estarán colocados sobre la línea negra.
- La línea comenzará en la apertura de la posición de inicio, marcada con cinta adhesiva negra de 5 cm de ancho.
- La posición exacta de los obstáculos y de la línea negra no se compartirá con antelación y puede cambiar durante la competencia.
- Consulta las reglas generales para más información.
Puntuación:
- 10 puntos por mantener tu robot en la línea negra excepto cuando evite un obstáculo.
- 10 puntos por cada obstáculo evitado con éxito.
- 10 puntos: Por sonar una alarma al detectar cada obstáculo.
- Se otorgarán puntos por tiempo (120 – tiempo de ejecución) si se han obtenido los puntos máximos y el robot regresa a la posición de inicio.
Por ejemplo, si el robot permanece en la línea (10), evita cada obstáculo (60), suena una alarma al detectar cada obstáculo (60), y regresa al inicio en 97 segundos, el equipo recibirá 23 puntos adicionales, sumando un total de 153 puntos.
Organización de Suministros Médicos - Clasificación:
Mientras nos preparamos para una misión humanitaria, nuestro equipo de logística cuenta con tu experiencia para categorizar y optimizar los suministros para una distribución rápida. Tu tarea es agrupar estos elementos esenciales según su color, asegurando una estrategia de despliegue sin problemas para una asistencia rápida a las regiones afectadas.
Los competidores deben programar sus robots para clasificar bolas blancas y negras en áreas designadas en la pista. Las bolas blancas deben colocarse en un área blanca, mientras que las bolas negras deben colocarse en un área negra.
Los equipos deben notificar al árbitro si el control será por RC (Control Remoto) o mediante Auto (Automatización) usando la tarjeta de cambio en el punto de inicio.
RC
Si su equipo elige RC, su robot puede ser controlado de forma remota. El operador puede mover el robot por el área recogiendo pelotas y depositándolas en la zona correcta.
Auto
Si su equipo elige Auto, su robot debe completar la tarea de manera autónoma. El equipo puede iniciar la tarea presionando un botón de "inicio" en el robot o en un control remoto. No se permitirá ninguna otra interacción.
Detalles específicos de la tarea:
- Las dimensiones de la pista son aproximadamente 2m de ancho por 2m de largo.
- La pista tendrá un perímetro de MDF color marrón claro de 10 cm de altura.
- En una esquina izquierda habrá un área blanca de 50 cm x 50 cm, delimitada por dos piezas de madera blanca de 1 cm de altura. En la esquina derecha se ubicará un área negra del mismo tamaño, delimitada por dos piezas de madera negra de 1 cm de altura.
- Cinco bolas blancas de 5.5 cm de diámetro y cinco bolas negras de 5.5 cm de diámetro se colocarán aleatoriamente en el cuadrado.
- La posición exacta de las bolas no se compartirá con antelación y puede cambiar durante la competencia.
- Consulta las reglas generales para más información.
Puntuación:
- 10 puntos por cada bola colocada en la región de color correcta.
- Puntos de tiempo (120 – tiempo de ejecución) se otorgarán si se han obtenido los puntos máximos y el robot regresa a la posición de inicio.
Por ejemplo, si el robot coloca 7 bolas en la caja correspondiente (70), y regresa al inicio en 97 segundos, el equipo recibirá 23 puntos adicionales, sumando un total de 93 puntos.
Localizador de Minas Terrestres - Detector Magnético:
En una región conflictiva, el Grupo de Trabajo de Lucha contra el Terrorismo de la ONU despliega robots con sensores de detección de campos magnéticos para localizar dispositivos explosivos improvisados (IED) ocultos en una ruta. Al detectar uno, los robots emiten alarmas, asegurando así la seguridad del personal.
En esta tarea, la ruta estará marcada con una línea negra y llena de varios objetos magnéticos planos. Los competidores deben equipar a sus robots con sensores de detección de campos magnéticos para identificar y localizar estos objetos. Una vez detectados, se debe emitir un sonido.
Los equipos deben notificar al árbitro si el control será por RC (Control Remoto) o mediante Auto (Automatización) usando la tarjeta de cambio en el punto de inicio.
RC
Si su equipo elige RC, su robot puede ser controlado de forma remota. El operador puede mover el robot por el área recogiendo pelotas y depositándolas en la zona correcta.
Auto
Si su equipo elige Auto, su robot debe completar la tarea de manera autónoma. El equipo puede iniciar la tarea presionando un botón de "inicio" en el robot o en un control remoto. No se permitirá ninguna otra interacción.
Detalles específicos de la tarea:
- Las dimensiones de la pista son aproximadamente 2m de ancho por 4m de largo.
- La línea negra estará marcada con cinta adhesiva negra de 5 cm de ancho.
- La línea comenzará en la apertura de la posición de inicio marcada con cinta adhesiva negra de 5 cm de ancho.
- La posición exacta de las minas terrestres (imanes de nevera) y de la línea negra no se compartirá con antelación y puede cambiar durante la competencia.
- Consulta las reglas generales para más información.
Puntuación:
- 10 puntos por mantener tu robot en la línea negra.
- 10 puntos por detenerse en la mina terrestre momentáneamente.
- 10 puntos: Por hacer sonar una alarma para indicar la detección de una mina terrestre.
- Se otorgarán puntos por tiempo (120 – tiempo de ejecución) si se han obtenido los puntos máximos y el robot regresa a la posición de inicio.
Por ejemplo, si el robot detecta 3 minas terrestres haciendo sonar una alarma (30), se detiene momentáneamente en cada mina terrestre (30) y regresa al inicio en 97 segundos, el equipo recibirá 23 puntos adicionales, sumando un total de 83 puntos.
Cadena de Suministro - Botellas de Agua:
Los competidores programan sus robots para escanear, localizar, recoger y depositar con precisión una botella estándar de agua de 330 ml, que contiene 25 ml de agua, dentro de una zona central en la pista marcada con una línea, simulando una tarea crucial de recuperación de suministros en un escenario de ayuda en desastres. El robot debe seguir una línea hasta la zona de la botella de agua, localizar la botella, entregarla al área designada y regresar a casa.
Los equipos deben notificar al árbitro si el control será por RC (Control Remoto) o mediante Auto (Automatización) usando la tarjeta de cambio en el punto de inicio.
RC
Si su equipo elige RC, su robot puede ser controlado de forma remota.
Auto
Si su equipo elige Auto, su robot debe completar la tarea de manera autónoma. El equipo puede iniciar la tarea presionando un botón de "inicio" en el robot o en un control remoto. No se permitirá ninguna otra interacción.
Detalles específicos de la tarea:
- Las dimensiones de la pista son aproximadamente 2m de ancho por 4m de largo.
- La línea negra estará marcada con cinta adhesiva negra de 5 cm de ancho.
- La línea comenzará en la apertura de la posición de inicio marcada con cinta adhesiva negra de 5 cm de ancho.
- La botella será una botella estándar de 33 cl de agua.
- La posición de la botella de agua, la línea negra y el área de llenado no se compartirán con antelación y pueden cambiar durante la competencia.
- Consulta las reglas generales para más información.
Puntuación:
- 10 puntos por mantener tu robot en la línea negra.
- 10 puntos: Por cualquier movimiento de la botella.
- 10 puntos: Si la botella está tocando el suelo en el área de llenado.
- Se otorgarán puntos por tiempo (120 – tiempo de ejecución) si se han obtenido los puntos máximos y el robot regresa a la posición de inicio.
Por ejemplo, si el robot permanece en la línea (10), mueve la botella (10), la coloca en el círculo (10) y regresa al inicio en 97 segundos, el equipo recibirá 23 puntos adicionales, sumando un total de 53 puntos.
*Toma en cuenta que las reglas de la competencia de robótica están sujetas a cambios. Los organizadores se reservan el derecho de modificar, agregar o eliminar reglas según sea necesario para la realización justa y segura de la competencia. Cualquier actualización se publicará en este sitio web, el canal oficial de la Competencia de Robótica y se espera que los participantes se mantengan informados y se adhieran a las reglas más recientes.
Gracias por tu comprensión y cooperación.